Welcome to Byeonggyu’s Homepage! 👋
- I am a graduate student at Seoul National University and a member of the Autonomous Robot Intelligence Laboratory (ARIL) .
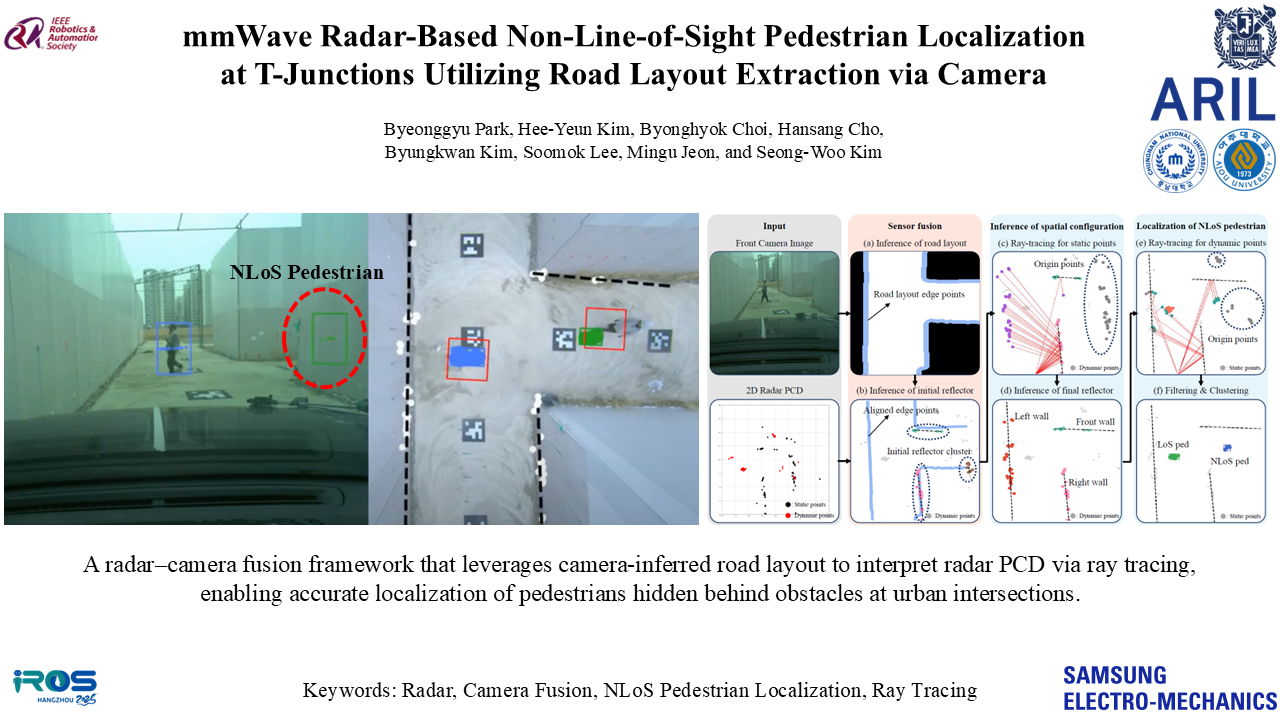
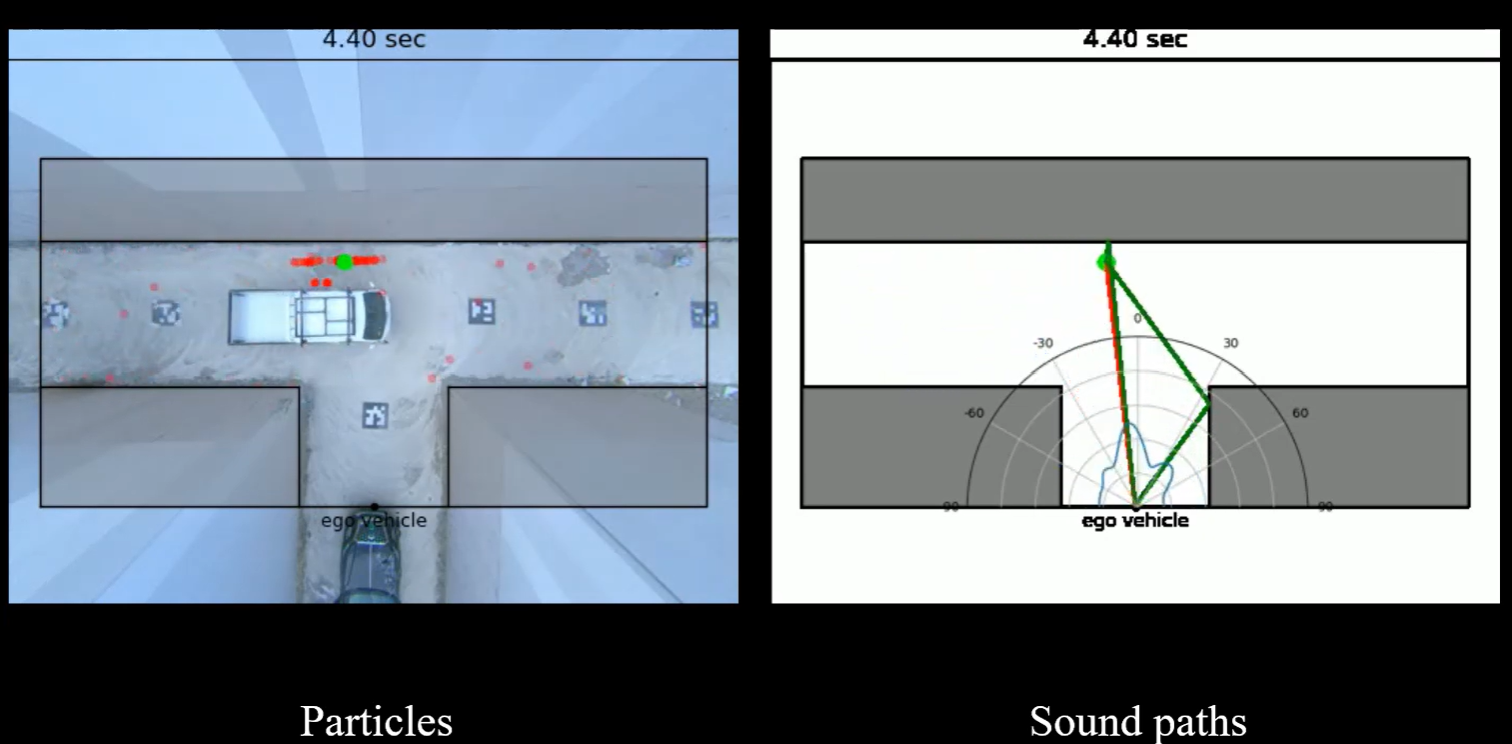
- My research focuses on Non-Line-of-Sight (NLoS) object detection and scene understanding through multi-modal sensor fusion across radar, camera, LiDAR, and acoustic modalities for robust perception in autonomous systems.
- My broader interests include physics-aware perception and learning, intelligent robotic systems, and human–robot interaction.
Education
- Seoul National University — Integrated M.S./Ph.D. (2025 – Present)
- Kookmin University — B.S. in Computer Science (2018 – 2024)
Research Interests
- Non-Line-of-Sight (NLoS) Object Detection and Scene Understanding
- Sensor Fusion across Radar, Camera, LiDAR, and Acoustic Modalities
- Physics-Aware Perception and Learning for Multi-Modal Sensing
- Intelligent Robotic Systems and Human–Robot Interaction (HRI)
Selected Publications
-
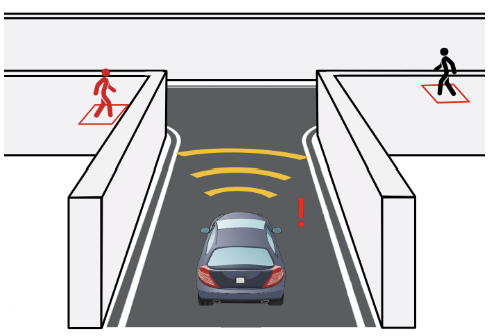 “Non-Line-of-Sight Multi-Target Localization in T-Junctions Using Ray Tracing of mmWave Radar.”IEEE Intelligent Vehicle Symposium (IV), June 2025
“Non-Line-of-Sight Multi-Target Localization in T-Junctions Using Ray Tracing of mmWave Radar.”IEEE Intelligent Vehicle Symposium (IV), June 2025

Awards & Honors
- 🥇 Grand Prize (1st place) — Scale-Car-Based Autonomous Driving Competition
- 🥈 2nd Place (President’s Award) — 2023 Baemin Autonomous Driving Challenge
- 🌟 Innovation Award — Future Mobility Urban Challenge (Seoul National University)
- 🥇 Grand prize (1st place) & 🌟 Special Award — 2023 HL Mando & HL Klemove Autonomous Mobility Challenge
Academic & Extracurricular Activities
- World Solar Challenge 2025 — SNU Solo Team
Strategy team member, responsible for real-time telemetry, route optimization, and energy management for solar-powered vehicles. - UCI Internship — Platoon of Autonomous Vehicles
University of California, Irvine (2022). Research internship on multi-vehicle platooning and autonomous control strategies. - Mentor — Samsung SDS Smart Hackathon
Guided participants in algorithm design and community problem-solving prototyping (2021). - FOSCAR — Autonomous Driving Club
Developed perception and control systems for a 1/4-scale autonomous vehicle (2022–2024).
Contact
📧 bg.park@snu.ac.kr
💻 GitHub
📚 Google Scholar
🔗 LinkedIn
Last updated: October 2025